Hand Neuromechanics
Direction 1: Sensorimotor integration of within-hand manipulation
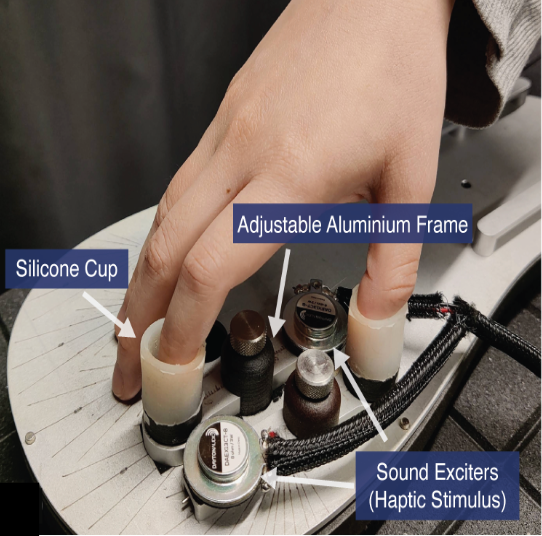
In everyday life, our hands are constantly interacting with objects. This interaction, enabled by immediate and continuous sensory feedback, is crucial in shaping hand dexterity. Stroke survivors with sensory impairment have been found to have delayed and incomplete motor recovery. Driven by both theoretical and rehabilitation needs to understand sensorimotor interaction in hand control, we, together with our engineering collaborators at the Johns Hopkins University, has been working on augmenting haptic feedback onto our force-sensing HAND device. Our preliminary results showed an intriguing interaction between visual and haptic feedback for enhancing performance in a virtual precision grip task, fine-tuned to sensory parameters in each modality (Pimpalkar, 2024). We also designed a cross-modal matching method (Pimpalkar, et al. 2025) to optimally parametrize visual and haptic sensing for motor skill training.
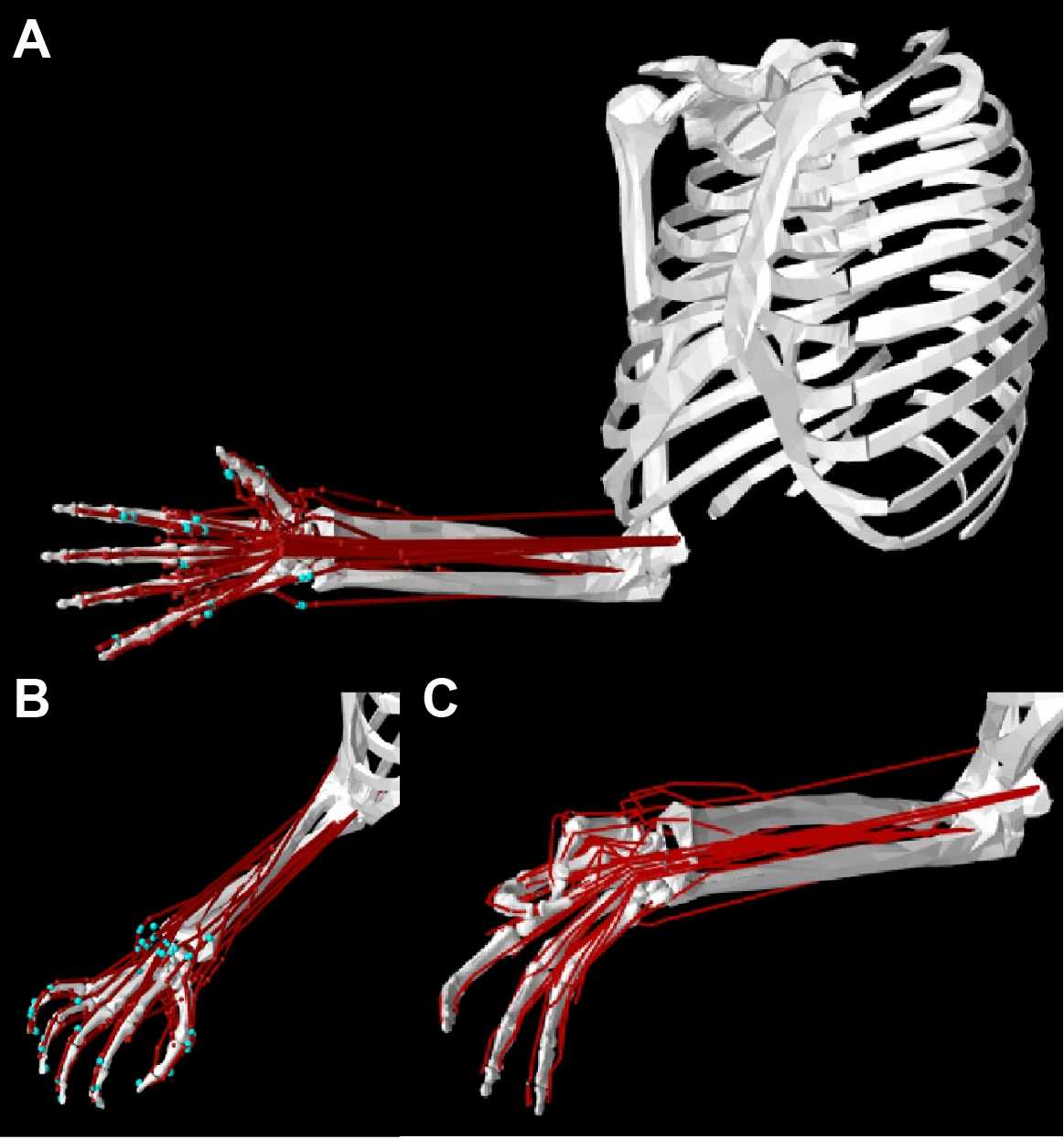
Direction 2: Modeling hand biomechanicse
The rich and complex repertoires of the human hands are given rise to by the intricate interactions among biomechanical, neural, and social factors. Another of our research directions is to examine biomechanical constraints of the human hand. We are collaborating with the ArtiSynth group to simulate biomechanical repertoires of hand movements. This powerful tool will provide great insight into the neural and biomechanical factors in hand control in everyday life and in high-level manual skills.